推 wahaha99 : ...不就解算出姿態後, 減掉向下的重力加速度? 12/23 20:50
→ wahaha99 : 好比說目前垂直爬升中, 那麼姿態就是俯仰, 12/23 20:50
→ wahaha99 : 這時剛好加速度與重力重疊, 就減掉 12/23 20:51
→ wahaha99 : 如果是其他姿態,也只是加入另兩軸的和計算 12/23 20:52
推 kdjf : 當你的陀螺儀一小時只漂一度時,幹嘛交互矯正... 飛 12/23 21:05
→ kdjf : 夠高還有 12/23 21:05
推 ckbling : 戰機在起飛前整備的時候會先對著這幾個慣性測量儀 12/23 21:34
→ ckbling : 器校正 12/23 21:34
→ ckbling : 艦載機因為有航艦移動與海浪有專屬航艦部署的特殊 12/23 21:34
→ ckbling : 校正模式 12/23 21:34
推 wahaha99 : 不是啊,真實重力加速度是由加速度計計算的, 12/23 21:36
→ wahaha99 : 而真實加速度計本來就包含重力了, 12/23 21:36
→ wahaha99 : 不會不知道啊, 從讀數上就是水平無加速度時, 12/23 21:37
→ wahaha99 : 會朝向地心有一個9.8m/s^2的加速度在, 12/23 21:37
→ wahaha99 : 或是計做1G 12/23 21:37
推 ckbling : 也就是做高G機動以前重力方向已經確定了 最多就是ov 12/23 21:38
→ ckbling : erflow 的問題 12/23 21:38
推 wahaha99 : 你各位現在就是受到1G啊, 垂直地心的 12/23 21:40
→ wahaha99 : 如果說你在加速度計上看不到這1G, 那是被軟體計算時 12/23 21:41
→ wahaha99 : 給刻意減掉了 12/23 21:41
→ wahaha99 : 計算的是扣掉地心引力外的加速度 12/23 21:41
→ wahaha99 : .....姿態是陀螺儀的事情 12/23 21:56
→ wahaha99 : 你從陀螺儀得到姿態,自然能解算加速計這邊的加速度 12/23 21:56
→ wahaha99 : 是相對機身什麼方向 12/23 21:57
推 redsquad : 平飛0.75G加速跟37.5度等速爬升 讀值會一樣吧? 12/23 21:59
→ wahaha99 : 或是換個角度說好了, 加速度計是絕對向量, 12/23 22:00
→ wahaha99 : 是基於地球引力的,姿態則是相對向量, 12/23 22:00
→ wahaha99 : 光有加速度計, 你只能解算出絕對加速度, 12/23 22:01
→ wahaha99 : 沒辦法解算實際上機體的方向(我朝X軸做2G加速, 12/23 22:02
→ wahaha99 : 是機頭?機尾方向? 不知道) 12/23 22:02
→ wahaha99 : 所以才會用上陀螺儀, 來加上姿態 12/23 22:03
→ wahaha99 : 至於你說的互補,那個是校正問題,但初期沒問題啊, 12/23 22:03
→ wahaha99 : 起飛時依照水平校正就完事 12/23 22:03
→ wahaha99 : 到後期誰校正誰,就看誰累積務差小啊,但累積到一個 12/23 22:04
→ wahaha99 : 程度,就一定還是得重來的,兩個都會有誤差 12/23 22:04
→ wahaha99 : (還是加速度計沒有累積誤差,我有點忘了) 12/23 22:05
→ wahaha99 : 不過跟高G不高G倒是沒啥關聯, 我記得陀螺儀的誤差是 12/23 22:05
→ wahaha99 : 隨時間累積而不是隨加速度或姿態累積 12/23 22:06
推 wahaha99 : 回redsquad,看你是指三軸還是一軸 12/23 22:08
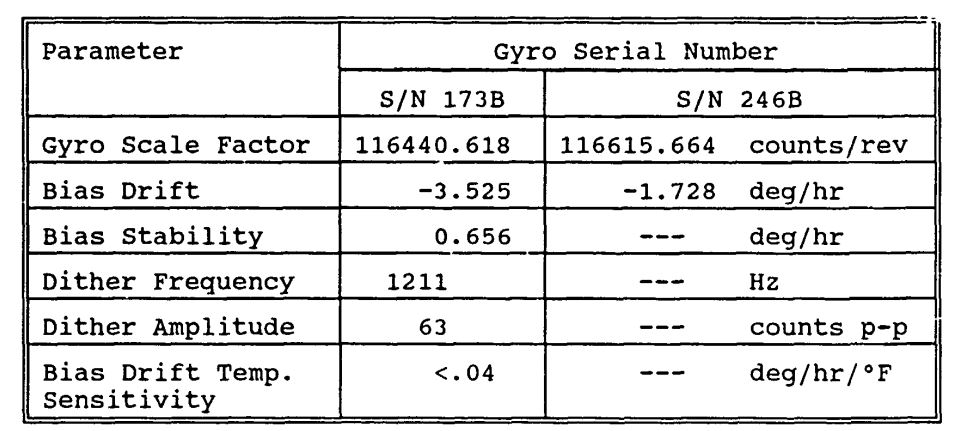
→ kdjf : 這是顆199x的量產雷射陀螺儀,在戰機沒油前頂多差2度 12/23 22:55
→ kdjf : 用好一點的陀螺儀,你在想的問題直接不存在 12/23 22:56
推 hjfreaks : 滾轉roll 姿態看姿態儀 姿態儀就是用陀螺儀原理 12/24 00:03
→ TakeokaMiho : 起飛前校正 後面全部陀螺儀 12/24 01:48
→ snalvc : 你所謂陀螺儀加速度計互補濾波是MEMS才要這樣做吧 12/24 09:53
→ snalvc : 光纖或是雷射陀螺儀積分誤差和MEMS陀螺儀不在同一個 12/24 09:54
→ snalvc : 等級 12/24 09:54
→ snalvc : 還有傳統機械式陀螺儀是直接給角度並不是角速度 12/24 09:56
推 tfe : 一般民用的姿態計算不是用不太準的互補濾波,是用Ka 12/25 11:38
→ tfe : lman filter, Kalman filter 從早期的EKF,發展到現 12/25 11:38
→ tfe : 在的UKF。軍用的應該有更準確的演算法跟更準確也更 12/25 11:38
→ tfe : 貴的感測器 12/25 11:38